
[ad_1]
Your model new family robot is shipped to your home, and you question it to make you a cup of coffee. Although it appreciates some simple competencies from earlier exercise in simulated kitchens, there are way as well quite a few steps it could probably just take — turning on the faucet, flushing the toilet, emptying out the flour container, and so on. But there’s a very small selection of actions that could possibly be handy. How is the robotic to figure out what ways are reasonable in a new scenario?
It could use PIGINet, a new process that aims to effectively increase the issue-resolving abilities of home robots. Researchers from MIT’s Pc Science and Artificial Intelligence Laboratory (CSAIL) are utilizing equipment understanding to slice down on the typical iterative approach of undertaking planning that considers all probable actions. PIGINet gets rid of undertaking ideas that simply cannot fulfill collision-no cost demands, and lowers arranging time by 50-80 per cent when experienced on only 300-500 challenges.
Generally, robots attempt a variety of undertaking designs and iteratively refine their moves till they discover a feasible option, which can be inefficient and time-consuming, specifically when there are movable and articulated obstacles. Perhaps right after cooking, for case in point, you want to place all the sauces in the cabinet. That challenge could choose two to eight measures dependent on what the planet appears to be like like at that moment. Does the robotic require to open multiple cabinet doors, or are there any obstructions inside of the cupboard that require to be relocated in buy to make room? You do not want your robotic to be annoyingly slow — and it will be even worse if it burns dinner while it’s thinking.
Residence robots are usually assumed of as pursuing predefined recipes for doing jobs, which is not constantly suited for varied or switching environments. So, how does PIGINet keep away from all those predefined rules? PIGINet is a neural network that takes in “Plans, Pictures, Aim, and Preliminary specifics,” then predicts the probability that a undertaking approach can be refined to uncover feasible movement programs. In very simple conditions, it employs a transformer encoder, a multipurpose and point out-of-the-artwork product built to function on details sequences. The enter sequence, in this case, is details about which job program it is thinking about, photos of the setting, and symbolic encodings of the preliminary point out and the wanted purpose. The encoder brings together the endeavor designs, image, and text to produce a prediction regarding the feasibility of the picked endeavor approach.
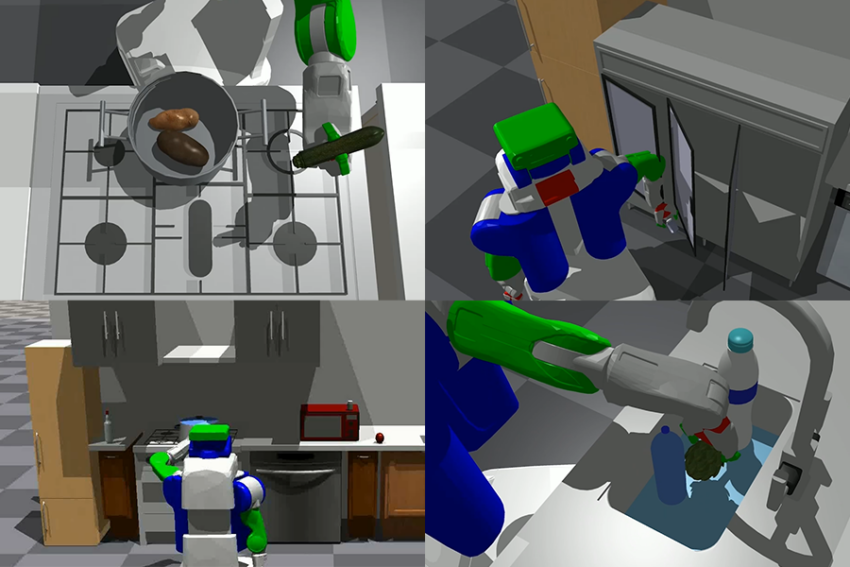
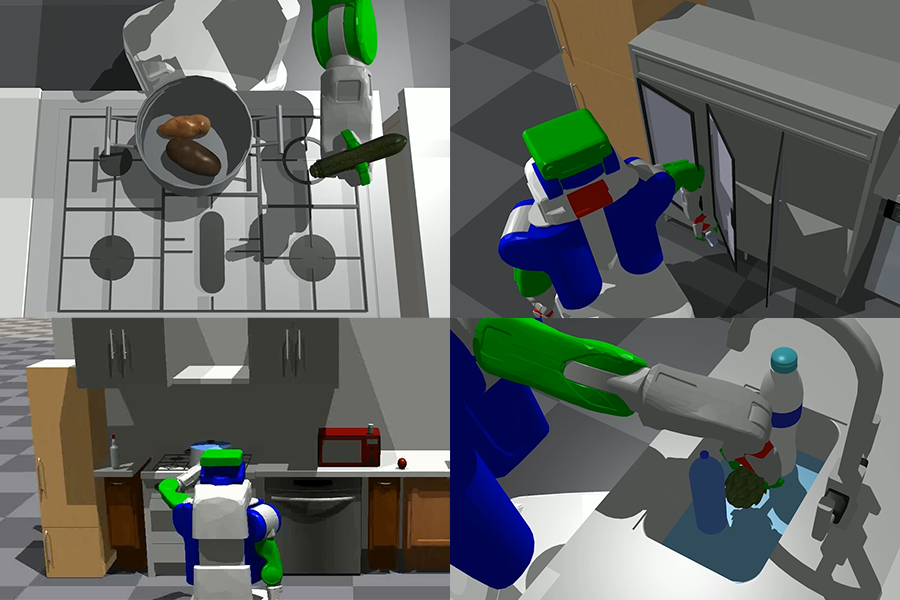
Preserving items in the kitchen, the team established hundreds of simulated environments, each and every with different layouts and particular tasks that demand objects to be rearranged among the counters, fridges, cupboards, sinks, and cooking pots. By measuring the time taken to resolve difficulties, they compared PIGINet towards prior methods. 1 proper job prepare could consist of opening the left fridge doorway, eliminating a pot lid, shifting the cabbage from pot to fridge, going a potato to the fridge, choosing up the bottle from the sink, placing the bottle in the sink, choosing up the tomato, or placing the tomato. PIGINet considerably minimized organizing time by 80 p.c in simpler eventualities and 20-50 % in much more elaborate scenarios that have for a longer period system sequences and fewer instruction facts.
“Systems this sort of as PIGINet, which use the power of knowledge-driven strategies to deal with acquainted cases successfully, but can nevertheless slide back on “first-principles” scheduling techniques to validate understanding-based suggestions and address novel challenges, present the ideal of equally worlds, supplying responsible and productive basic-purpose answers to a vast assortment of complications,” states MIT Professor and CSAIL Principal Investigator Leslie Pack Kaelbling.
PIGINet’s use of multimodal embeddings in the enter sequence authorized for far better illustration and knowing of advanced geometric interactions. Using picture info aided the model to grasp spatial preparations and object configurations with out recognizing the object 3D meshes for exact collision examining, enabling fast decision-generating in distinctive environments.
A person of the main troubles faced throughout the progress of PIGINet was the scarcity of excellent coaching information, as all feasible and infeasible programs need to be generated by regular planners, which is gradual in the first put. Having said that, by working with pretrained eyesight language models and details augmentation tips, the group was able to tackle this problem, demonstrating remarkable plan time reduction not only on problems with viewed objects, but also zero-shot generalization to previously unseen objects.
“Because everyone’s household is distinct, robots need to be adaptable dilemma-solvers alternatively of just recipe followers. Our important idea is to permit a basic-reason activity planner create applicant endeavor options and use a deep learning model to find the promising ones. The consequence is a far more effective, adaptable, and functional family robot, one that can nimbly navigate even sophisticated and dynamic environments. Furthermore, the functional programs of PIGINet are not confined to households,” states Zhutian Yang, MIT CSAIL PhD student and guide author on the work. “Our foreseeable future goal is to even further refine PIGINet to propose alternate job designs after pinpointing infeasible actions, which will even further speed up the era of possible process ideas devoid of the want of significant datasets for instruction a general-reason planner from scratch. We feel that this could revolutionize the way robots are skilled during advancement and then used to everyone’s properties.”
“This paper addresses the essential problem in applying a standard-objective robotic: how to study from earlier practical experience to pace up the conclusion-building procedure in unstructured environments loaded with a huge amount of articulated and movable road blocks,” suggests Beomjoon Kim PhD ’20, assistant professor in the Graduate School of AI at Korea Highly developed Institute of Science and Know-how (KAIST). “The main bottleneck in these types of difficulties is how to identify a superior-degree process prepare these kinds of that there exists a low-degree movement plan that realizes the large-amount approach. Commonly, you have to oscillate in between motion and process setting up, which results in major computational inefficiency. Zhutian’s operate tackles this by utilizing mastering to reduce infeasible job strategies, and is a action in a promising course.”
Yang wrote the paper with NVIDIA investigate scientist Caelan Garrett SB ’15, MEng ’15, PhD ’21 MIT Office of Electrical Engineering and Laptop Science professors and CSAIL users Tomás Lozano-Pérez and Leslie Kaelbling and Senior Director of Robotics Investigation at NVIDIA and College of Washington Professor Dieter Fox. The crew was supported by AI Singapore and grants from Countrywide Science Foundation, the Air Power Office of Scientific Exploration, and the Military Exploration Business. This venture was partially done while Yang was an intern at NVIDIA Analysis. Their research will be presented in July at the conference Robotics: Science and Systems.
[ad_2]
Source hyperlink